#include <rdo.h>
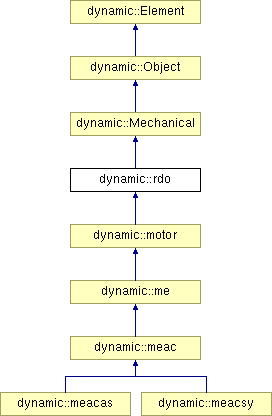
Inheritance diagram for dynamic::rdo:
Public Member Functions | |
| rdo (double inertia, double rigidity, double damping=0, double defle=0, double speed=0) | |
| full constructor | |
| double | inertia () |
| void | inertia (double inertia) |
| set weight | |
| double | torque_spring () |
| double | torque_damper () |
| double | defle_form (double defle) throw (std::invalid_argument) |
| Defle form. | |
| double rdo::defle_form | ( | double | defle | ) | throw (std::invalid_argument) |
Defle form.
| double rdo::inertia | ( | ) |
| double rdo::torque_damper | ( | ) |
| double rdo::torque_spring | ( | ) |
 1.4.7
1.4.7