#include <meacas.h>
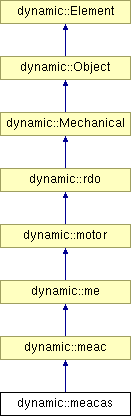
Inheritance diagram for dynamic::meacas:
Public Member Functions | |
| meacas (double inertia, double torqur_nominal, double torque_start, double torque_breakdown, int number_of_pole) | |
| Partial constructor for this electromotor. | |
| void | torque_nominal (double torque_nominal) |
| Set nominal torque. | |
| void | torque_start (double torque_start) |
| Set start torque. | |
| void | torque_breakdown (double torque_breakdown) |
| Set breakdown torque. | |
| void | number_of_pole (int number_of_pole) |
| Set number of pole. | |
| double | torque_nominal () const |
| double | torque_start () const |
| double | torque_breakdown () const |
| double | torque_aux () const |
| int | number_of_pole () const |
| int meacas::number_of_pole | ( | ) | const |
| double meacas::torque_aux | ( | ) | const |
| double meacas::torque_breakdown | ( | ) | const |
| double meacas::torque_nominal | ( | ) | const |
| double meacas::torque_start | ( | ) | const |
 1.4.7
1.4.7