#include <mechanical.h>
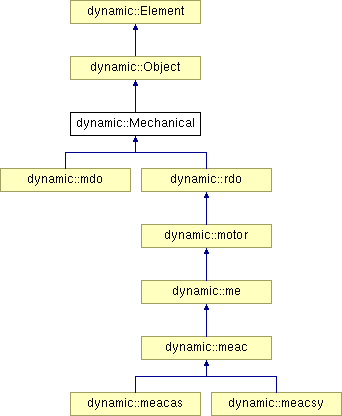
Inheritance diagram for dynamic::Mechanical:
Public Member Functions | |
| Mechanical () | |
| constructor | |
| ~Mechanical () | |
| destructor | |
| double | mass () const |
| actual time in model (vraci aktualni cas v modelu) | |
| double | rigidity () const |
| element rigidity | |
| double | damping () const |
| element damping | |
| double | defle () const |
| status elements info (deflection) | |
| double | speed () const |
| status element info (speed) | |
| double | accel () const |
| status element info (acceleration) | |
| double | defle_rel () const |
| relative status element info (rel_deflection) | |
| double | speed_rel () const |
| relative status element info (speed) | |
| double | accel_rel () const |
| relative statuss element info (acceleration) | |
| void | defle (double defle) |
| set start deflection | |
| void | speed (double speed) |
| set start speed | |
| void | mass (double mass) throw (std::invalid_argument) |
| actual time in model set mass of Base system | |
| void | rigidity (double rigidity) throw (std::invalid_argument) |
| set rigidity of Base system | |
| void | damping (double damping) throw (std::invalid_argument) |
| set damping of Base system | |
| double | power () const |
| Power on this element. | |
| void | calculation_const () throw (std::runtime_error,std::invalid_argument) |
| Making status matrix (vytvoreni stavovych rovnic). | |
| void | calculation () throw (std::runtime_error,std::invalid_argument) |
| --calculation-- :-) | |
Protected Member Functions | |
| double | force_spring_activity () const |
| Force activity in spring object (for MDO is it Force, for RDO is it Torque). | |
| double | force_damper_activity () const |
| Force activity in damper object (for MDO is it Force, for RDO is it Torque). | |
Classes | |
| class | LessZero |
| Exception LessZero If you want set any parameter less then zero when this parameter can be greater or equal zero. More... | |
| double Mechanical::accel | ( | ) | const |
status element info (acceleration)
| double Mechanical::accel_rel | ( | ) | const |
relative statuss element info (acceleration)
| double Mechanical::damping | ( | ) | const |
element damping
| double Mechanical::defle | ( | ) | const |
status elements info (deflection)
| double Mechanical::defle_rel | ( | ) | const |
relative status element info (rel_deflection)
| double Mechanical::force_damper_activity | ( | ) | const [protected] |
Force activity in damper object (for MDO is it Force, for RDO is it Torque).
| double Mechanical::force_spring_activity | ( | ) | const [protected] |
Force activity in spring object (for MDO is it Force, for RDO is it Torque).
| double Mechanical::mass | ( | ) | const |
actual time in model (vraci aktualni cas v modelu)
| double Mechanical::power | ( | ) | const |
Power on this element.
| double Mechanical::rigidity | ( | ) | const |
element rigidity
| double Mechanical::speed | ( | ) | const |
status element info (speed)
| double Mechanical::speed_rel | ( | ) | const |
relative status element info (speed)
 1.4.7
1.4.7