#include <system.h>
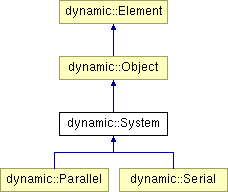
Inheritance diagram for dynamic::System:
Public Member Functions | |
| void | push_back (Object *p_Object) |
| push element to back of system | |
| void | push_front (Object *p_Object) |
| push element to front of system | |
| void | time_to (double time_to) throw (std::runtime_error,std::invalid_argument) |
Protected Member Functions | |
| void | set_boundary_conditions () |
| Set boundary conditions. | |
| void | set_elements () |
| Set elements. | |
| double | set_absolut_x (int position, double value) |
| Set absolut x value. | |
| double | set_absolut_dx (int position, double value) |
| Set absolut dx value. | |
| void | time_next (double time_max=0) throw (std::runtime_error,std::invalid_argument) |
| One computing step (use method Kunge-Kutta). | |
| void | calculation () throw (std::runtime_error,std::invalid_argument) |
| Calculation time dependecy values. | |
| virtual void | resize () |
| Resize matrixs. | |
| unsigned | matrix_rows () |
| Matrix rows. | |
| unsigned | elements () |
| Elements. | |
Protected Attributes | |
| std::list< Object * > | m_list |
| list of members | |
Classes | |
| class | SystemEmpty |
| Exception SystemEmpty If you want set any parameter less then zero when this parameter can be greater or equal zero. More... | |
| unsigned System::elements | ( | ) | [protected, virtual] |
| unsigned System::matrix_rows | ( | ) | [protected, virtual] |
| void System::time_to | ( | double | time_to | ) | throw (std::runtime_error,std::invalid_argument) |
computing from current model time to time_to
 1.4.7
1.4.7